
Wang, G.*, Cheng, T.*, Do, Y., Yang, H., Tao, Y., Gu, J., An, B., Yao, L. 2018. Printed Paper Actuator: A Low-cost Reversible Actuation and Sensing Method for Shape Changing Interfaces. In Proceedings of the 36th Annual ACM Conference on Human Factors in Computing Systems (CHI '18). ACM, New York, NY, USA. (* Contributed Equally) [ACM DL][PDF][Video]
Wang, G., Do, Y., Cheng, T., Yang, H., Tao, Y., Gu, J., An, B., Yao, L. 2018. Demonstrating Printed Paper Actuator: A Low-cost Reversible Actuation and Sensing Method for Shape Changing Interfaces. In Extended Abstracts of the 2018 CHI Conference on Human Factors in Computing Systems (CHI EA '18). ACM, New York, NY, USA. [ACM DL]
Wang, G.*, Cheng, T.*, Do, Y., Yang, H., Tao, Y., Gu, J., An, B., Yao, L. 2018. Showcasing Printed Paper Actuator: A Low-cost Reversible Actuation and Sensing Method for Shape Changing Interfaces. In Extended Abstracts of the 2018 CHI Conference on Human Factors in Computing Systems (CHI EA '18). ACM, New York, NY, USA. (* Contributed Equally) [ACM DL]
We present a printed paper actuator as a low cost, reversible and electrical actuation and sensing method. This is a novel but easily accessible enabling technology that expands upon the library of actuation-sensing materials in HCI. By integrating three physical phenomena, including the bilayer bending actuation, the shape memory effect of the thermoplastic and the current-driven joule heating via conductive printing filament, we developed the actuator by simply printing a single layer conductive Polylactide (PLA) on a piece of copy paper via a desktop fused deposition modeling (FDM) 3D printer.
In particular, I worked on the actuator's performance analysis according to power and capacitive and resistive sensing technique development.
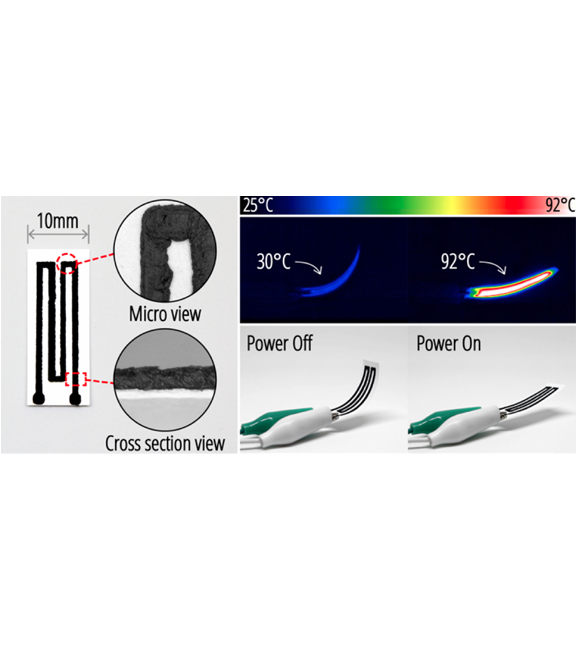
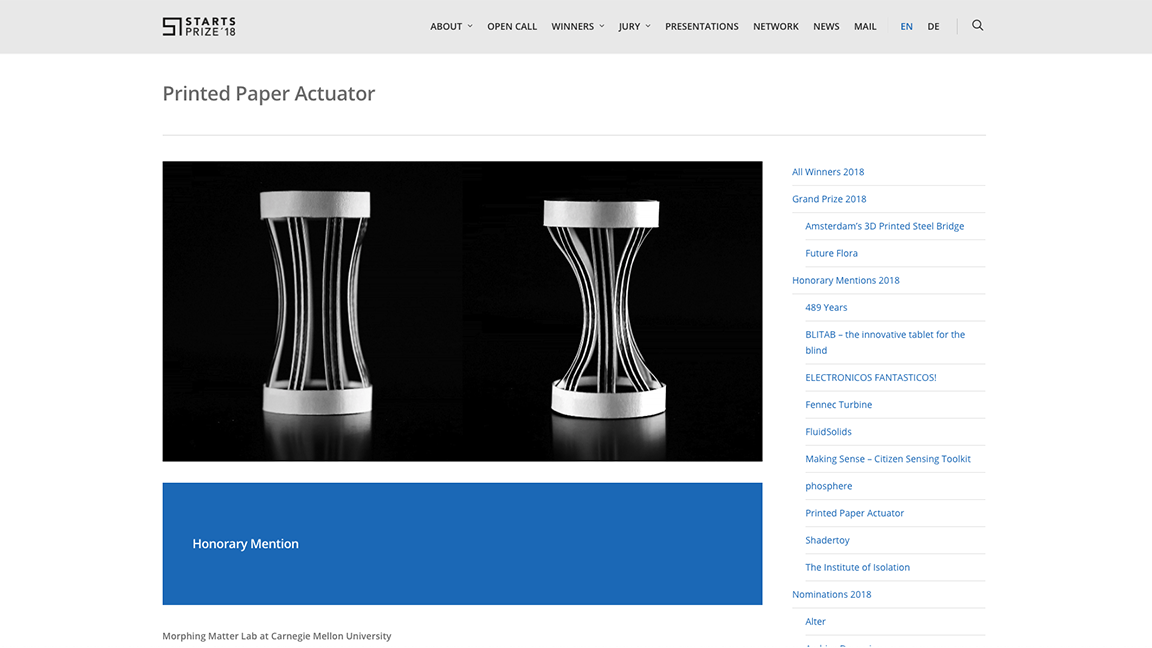
The structure of the actuator
This actuator has a bi-layer structure with a paper substrate and a conductive thermoplastic layer. When the thermoplatic is heated up, the actuator goes flat. Otherwise, it goes back to its initial curved form.
Power Consumption and Control
The purpose of these experiments was to determine the ideal normalized power per unit area (Pn), which can be applied to calculate the required driving voltage for any given actuator geometry. Heating the actuator insufficiently cannot make the sample flatten completely, while overheating diminishes the shape memory effect of the thermoplastic and destroys the actuator.
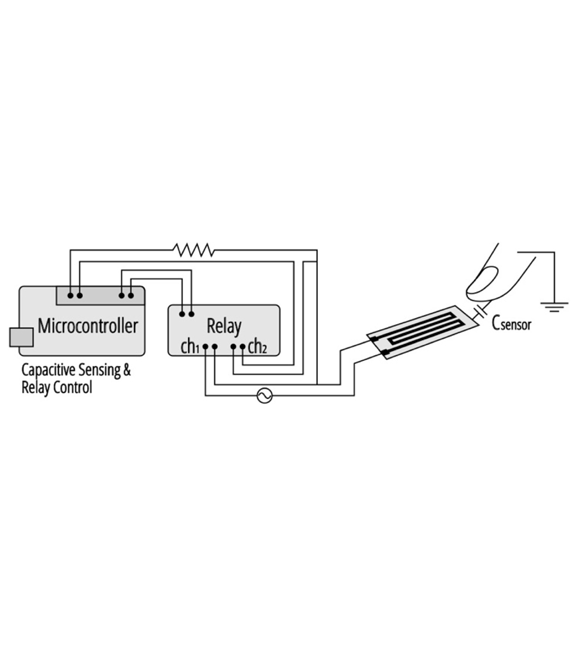
Capacitive Sensing
The conductivity of the printing filament enables our paper actuators to have capacitive property. The capacitance of the conductive material changes if there is contact with another conductive object. This allows us to detect the presence of a finger touch on a paper actuator sample. We use a transient response of the first order RC circuit to implement a capacitive sensor using a microcontroller.
I designed the circuit to implement a capacitive sensor and an actuation control in one circuit using relay control. This circuit is effectively used in Artificial Mimosa application explained later.
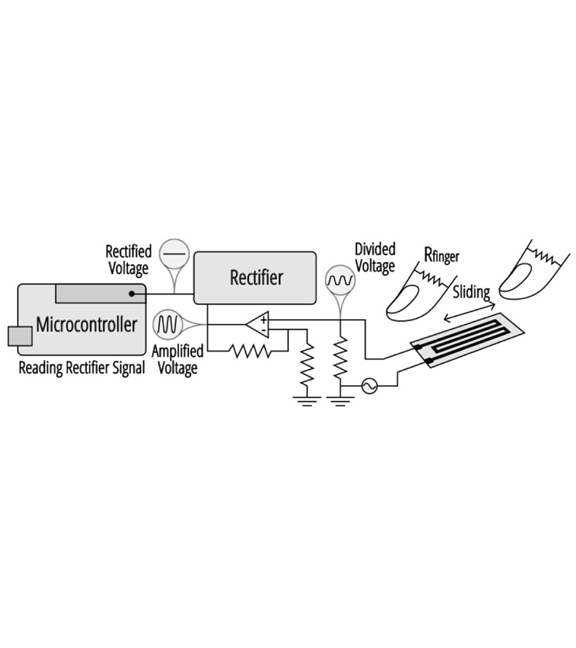
Resistive Sensing
A human body is not only capacitive but also resistive. The total resistance of a paper actuator changes if a finger contacts its printed conductive material. The resistance variation caused by touching a different part of the actuator results in sending a corresponding input voltage to an analog signal reader on a microcontroller. We take advantage of this property to implement a physical slider device. By mapping the range of voltage changes in the cursor position range, the cursor can be controlled simply by finger sliding on the paper actuator sample.
I made a circuit to detect a small current change using an operational amplifier. The basic circuit structure is used again in Self Bending Angle Detection technique.
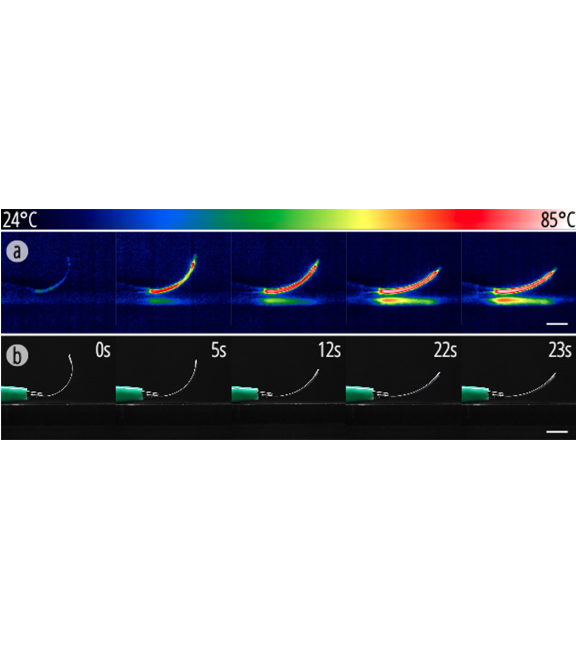
Self Bending Angle Detection
We found that as the result of a sample being heated and actuated, the resistance of the sample increases. The resistance changes according to the changes in the actuator’s bending angle. As a result, self-angle sensing is achieved based on the relationship between the sample’s resistance change and bending angle.
Artificial Mimosa
Capacitive Sensing + Actuation
We developed an artificial plant, a mimosa tree branch. When one of the mimosa’s leaves is touched, a sequential actuation is triggered to see each pair of leaves unfold one after another.
This work won a 2018 winner of Ars Electronica STARTS PRIZE and is invited for an exhibition at Linz, Austria during Ars Electronica 2018. [Link]